- Home
- Forums
- architecture/civil engineering
- civil engineering
- student forums architecture/engineering
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.



Stan9411
Guest
first of all, each variable you define would be well explained to the side of the sheet.... vbass vbtrasc vbam vbrel... You don't understand anything.
first error, absume vd nothing, you do not know why. if you do not analyze the system altogether you will never know if the do3 rod is rotating and therefore what is the speed of d.
then calculations db= 350 mm and vabe.
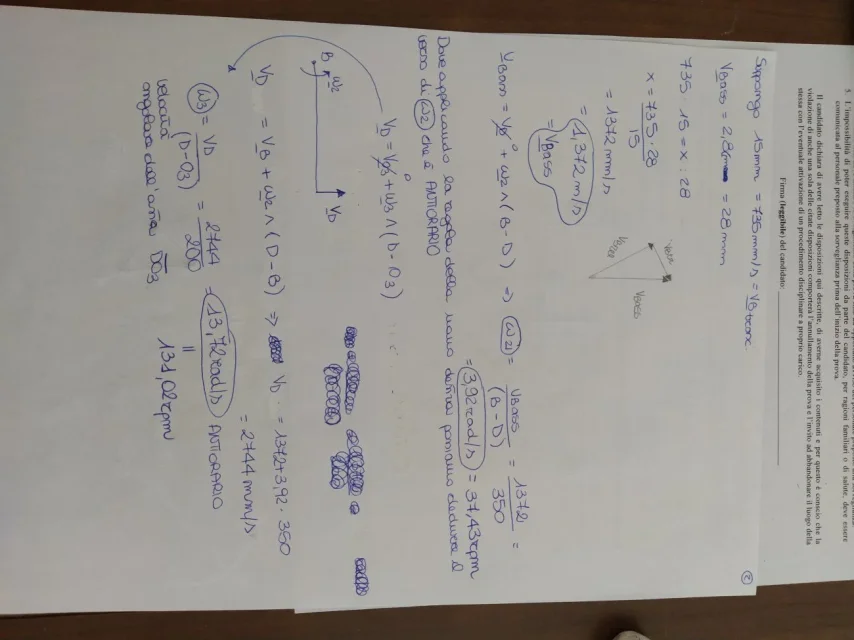
we turn the sheet and read “I suppose 15 mm = 735 mm/s = vbtrasc” ......
What do you suppose? So what is the calculation? Suppose a length and equals at a speed ... I do not want to imagine a professor who of these reads 120-150 per semester, what patience must have ..
first error, absume vd nothing, you do not know why. if you do not analyze the system altogether you will never know if the do3 rod is rotating and therefore what is the speed of d.
then calculations db= 350 mm and vabe.
we turn the sheet and read “I suppose 15 mm = 735 mm/s = vbtrasc” ......
What do you suppose? So what is the calculation? Suppose a length and equals at a speed ... I do not want to imagine a professor who of these reads 120-150 per semester, what patience must have ..
Martakynghi
Guest
writing in this forum is a lost cause. You're arrogant. instead of explaining where the error is attached to you as well on a writes absolute point speed in a short way according to your sick head I should write a glossary next to you. but please.
and after this answer I'd be happy if you block me.
Goodbye.
and after this answer I'd be happy if you block me.
Goodbye.
MassiVonWeizen
Guest
with all the diamonds that have been solved and explained, I feel definitely ungrateful your attitude.
You don't need to stop, just don't ask for anything.
You don't need to stop, just don't ask for anything.
MassiVonWeizen
Guest
considers always who reads you is almost always a professional who is voluntarily dedicating to you and free of charge his time, voluntarily, subtracting from other commitments. He does it by passion, but not for this he has to decipher abbreviated English, especially if they are abbreviated ad personam and not by a universal method, only to be able to understand what is spoken.
you are asking a question that serves you and so it is your duty to provide clear and accurate information so that everyone can read it the same way.
If you don't feel well, you have a teacher, who, yes, is paid to teach, call it and send it back because you are well aware of wrong.
you are asking a question that serves you and so it is your duty to provide clear and accurate information so that everyone can read it the same way.
If you don't feel well, you have a teacher, who, yes, is paid to teach, call it and send it back because you are well aware of wrong.
Martakynghi
Guest
delete me from this forum. You can be god. respect first of all.
you helped me but always with your arrogant attitude.
you helped me but always with your arrogant attitude.
Stan9411
Guest
I didn't want to be arrogant. I'm sorry you take it this way.
I honestly don't see where I failed you, I don't know you, how could I? .. if you take on staff a more clear request, it becomes hard to create a constructive speech.
sin because questions related to my work, which are seen little in a forum mainly voted for cad modeling and the design of mechanical organs.
If you want to resume the speech, giving a minimum of willingness to listen to constructive criticism, I hope I can help you
I honestly don't see where I failed you, I don't know you, how could I? .. if you take on staff a more clear request, it becomes hard to create a constructive speech.
sin because questions related to my work, which are seen little in a forum mainly voted for cad modeling and the design of mechanical organs.
If you want to resume the speech, giving a minimum of willingness to listen to constructive criticism, I hope I can help you
Stan9411
Guest
and yet the first mistake I have highlighted.first error, absume vd nothing, you do not know why. if you do not analyze the system altogether you will never know if the do3 rod is rotating and therefore what is the speed of d.
You could start thinking about this.
is the same as the other post. you cannot write speed triangles for points that do not have an absolute reference in space. vd can be nothing a priori.
arrived at this level of modeling I think you have made her the cinematic closures with the complex numbers. I work all my analysis on those so I master those well. It seems strange to me that you do not have the foundations because you are asked for the analysis of this type of cinematism.
Martakynghi
Guest
Okay.and yet the first mistake I have highlighted.
You could start thinking about this.
is the same as the other post. you cannot write speed triangles for points that do not have an absolute reference in space. vd can be nothing a priori.
arrived at this level of modeling I think you have made her the cinematic closures with the complex numbers. I work all my analysis on those so I master those well. It seems strange to me that you do not have the foundations because you are asked for the analysis of this type of cinematism.
then rod 01b I find the b absolute speed given by v(01)+w1•(b-01) (formula written in form).
v(d)=v(b)+w2•(d-b) and(formula written in form).
question: is the angle speed of the bd and d03 rod equal or not? Can you help me understand my problem, please?
Martakynghi
Guest
professional or not there are ways and ways to respond. If I write here because my professor doesn't make any more reception and told me to go to private lessons. I don't have money to pay for private lessons.considers always who reads you is almost always a professional who is voluntarily dedicating to you and free of charge his time, voluntarily, subtracting from other commitments. He does it by passion, but not for this he has to decipher abbreviated English, especially if they are abbreviated ad personam and not by a universal method, only to be able to understand what is spoken.
you are asking a question that serves you and so it is your duty to provide clear and accurate information so that everyone can read it the same way.
If you don't feel well, you have a teacher, who, yes, is paid to teach, call it and send it back because you are well aware of wrong.
MassiVonWeizen
Guest
You can tell me, maybe, that I'm caustic and brusque, but not stan941 that just pointed out your inaccuracies.professional or not there are ways and ways to respond.
Martakynghi
Guest
be' this is true of her but then it moderated compared to your first answer of my first post.You can tell me, maybe, that I'm caustic and brusque, but not stan941 that just pointed out your inaccuracies.
Calender
Guest
Leave him alone, but he went to the sea: and the land where we live. ..however if we want to make polemics the first to lack respect is just this enlightened "professionist" of the school...but I receive the criticism of someone, but that of the teacher should be a vocation more than a job..comunque. . made some criticism to the Italian system we pass to us :d ..If I write here because my professor no longer makes reception and told me to go to private lessons
vcomponents are not necessary to find trigonometric relationships and equations, just to disassemble the vectors (speed or force depending on the demand of the exercise) in the senses of the two axes x and y .. and to find the centers of instant rotation for each rod.question: is the angle speed of the bd and d03 rod equal or not? Can you help me understand my problem, please?
However in general do not take it with who tends a hand, regardless of how you put it (we are not all the same). When you're going to work, I see it really hard.
PierArg
Guest
Hello martakyngi,
Maybe stan in his first post was a little too direct. He apologized and explained you well so he didn't want to offend you.
If he hadn't written post #7, I would have called him back.
But you were a little too "fumantine."
first you took it by shooting at zero on the forum and then, even when stan returned on his steps and clarified yourself, you didn't even say a "thank you".
I think you should thank Stan.
and I stop here...otherwise I might point out to you how actually the arrogant is you") .
.
In any case, I am pleased that you have been made clear and that you can continue the discussion.
They have already answered you both stan and massive, so you are in good hands!
Maybe stan in his first post was a little too direct. He apologized and explained you well so he didn't want to offend you.
If he hadn't written post #7, I would have called him back.
But you were a little too "fumantine."
first you took it by shooting at zero on the forum and then, even when stan returned on his steps and clarified yourself, you didn't even say a "thank you".
I think you should thank Stan.
and I stop here...otherwise I might point out to you how actually the arrogant is you
.In any case, I am pleased that you have been made clear and that you can continue the discussion.
They have already answered you both stan and massive, so you are in good hands!
Stan9411
Guest
 you place a methodical resolution of the first point, based on the closure of the speed triangles of the entire right kinematic chain (then excluding the main shaft of the mechanism that for this point does not serve).
you place a methodical resolution of the first point, based on the closure of the speed triangles of the entire right kinematic chain (then excluding the main shaft of the mechanism that for this point does not serve).as you can see, apart from the initial setting of the various rotating carriers that is simply a form of my minds without which I can not even make the additions, from the second brackets scratches on then you get a system of equations in speed in the two axes x and y, but by force of things in a non-linear system, because bd rototrasla, also depend on the position of the various rods. for this I told you that you can't apply the theorem of relative motions, assuming a priori that a point is still.
in the next steps basically I go to replace the values of the various angles in the equations. being, in the crystallized instant in figure, almost all oriented to multiples of more Greek several breasts and things go away and in the end you remain a system of very simple equations, omega function and angular position of o1b that allow you to obtain range_point and beta_point. You don't need to do that. range_point is the angle speed of the o3d rod.
Stan9411
Guest
eye that for the conventions that I have defined, all the corners antiorari, omega will go -10 rpm.
Stan9411
Guest
It is clear that seeing it so the result can seem too simple for all the pappardellone I wrote. but it is because the exercise, intentionally, depicts the cinematism all in team at 90 degrees ... in general when these systems are characterized, especially in acceleration for the determination of couples and the choice of engines, we go to evaluate the entire arc of movement, because there is the possibility of impurities and strong non-linearity that to the eye can not be seen.
Stan9411
Guest
I didn't see the question. clearly not. In the moment photographed in the picture the equations simplify and does not make the idea, but seen globally (without simplifying the terms) you would realize that the equation of beta_point (angular velocity of bd) is strongly not linear and instant function of the position of other auctions.question: is the angle speed of the bd and d03 rod equal or not?
Martakynghi
Guest
I gave a first look but my professor does not solve them like this. Thank you and I'm sorry for yesterday's bad answer.It is clear that seeing it so the result can seem too simple for all the pappardellone I wrote. but it is because the exercise, intentionally, depicts the cinematism all in team at 90 degrees ... in general when these systems are characterized, especially in acceleration for the determination of couples and the choice of engines, we go to evaluate the entire arc of movement, because there is the possibility of impurities and strong non-linearity that to the eye can not be seen.
Now I'm going to go over what you told me, and I see we understand. Thank you.
Stan9411
Guest
If you take the relative motion theorem and the long x and y breaks you get exactly the same equations you see in the second system less than the last term I need to close the kinematic chain, but that is actually a fictitious rotary vector because delta is constant, then delta_point is null and in fact in the equation of speed is a useless term.
for the rest is equal to what you would get with the relative motions by disassembling on the two axes.
for the rest is equal to what you would get with the relative motions by disassembling on the two axes.