Steppermotor
Guest
Good afternoon to all.
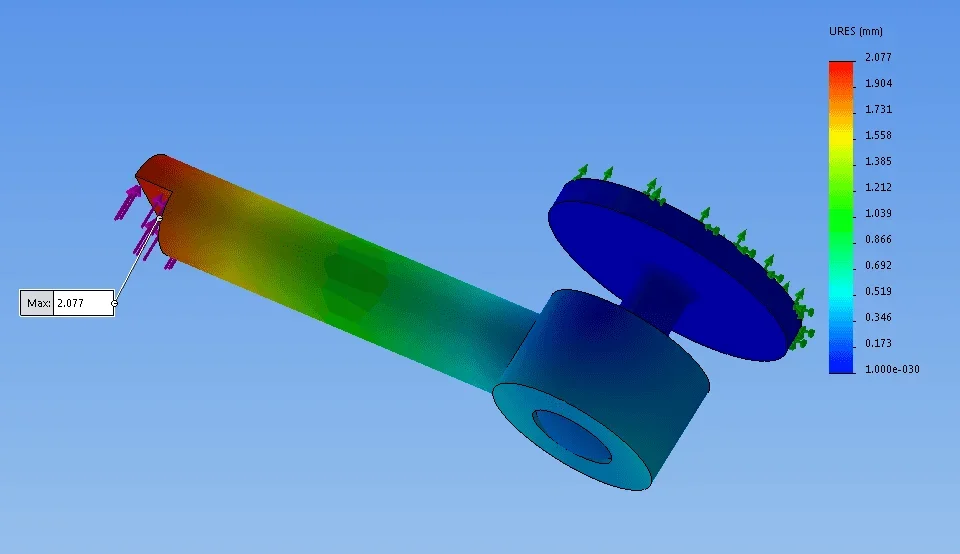
I have encountered a problem simulating a spherical snout with solidworks simulation, I attach a screen of the problem with a very simplified set and in practice the problem is this:
the sphere is bound as fixed, the joint is coupled by tangency and in simulation has contact without comprenetation.
the force on the lever is 1000n only to amplify the shift.
simulating I would have expected him to report that the system is labile instead simulated perfectly by blowing the auction.
even putting friction at 0 in the connection the simulation is similar.
In fact, as we see from the stress the greater effort has the pin of the sphere that in practice should not do any work.
this is only a simplified example but in the simulation of the real group the results are similar and doing a critical analysis of the results we have convinced that this coupling takes us off the road with all the simulation.
Has anyone had similar experiences?
Thank you.
I have encountered a problem simulating a spherical snout with solidworks simulation, I attach a screen of the problem with a very simplified set and in practice the problem is this:
the sphere is bound as fixed, the joint is coupled by tangency and in simulation has contact without comprenetation.
the force on the lever is 1000n only to amplify the shift.
simulating I would have expected him to report that the system is labile instead simulated perfectly by blowing the auction.
even putting friction at 0 in the connection the simulation is similar.
In fact, as we see from the stress the greater effort has the pin of the sphere that in practice should not do any work.
this is only a simplified example but in the simulation of the real group the results are similar and doing a critical analysis of the results we have convinced that this coupling takes us off the road with all the simulation.
Has anyone had similar experiences?
Thank you.
Attachments

Last edited: