elleci
Guest
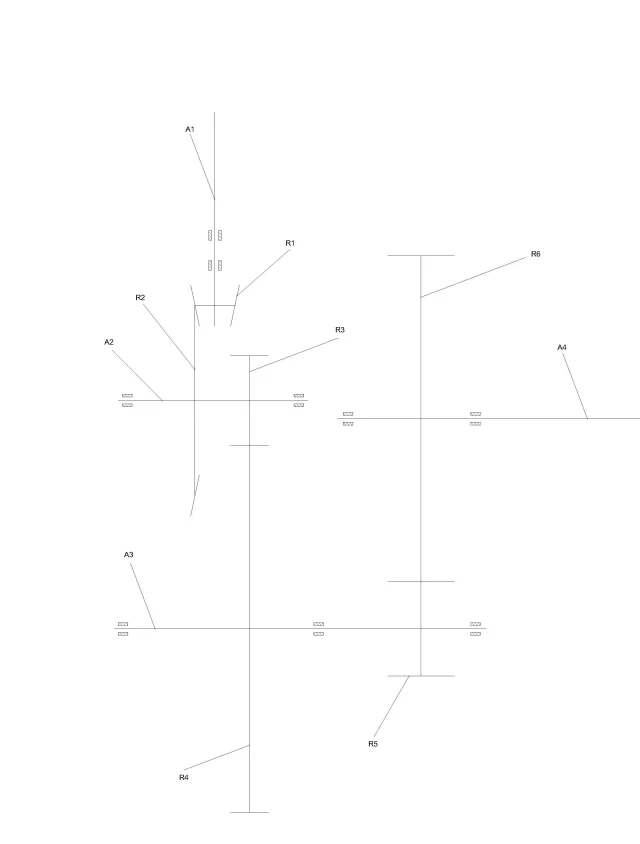
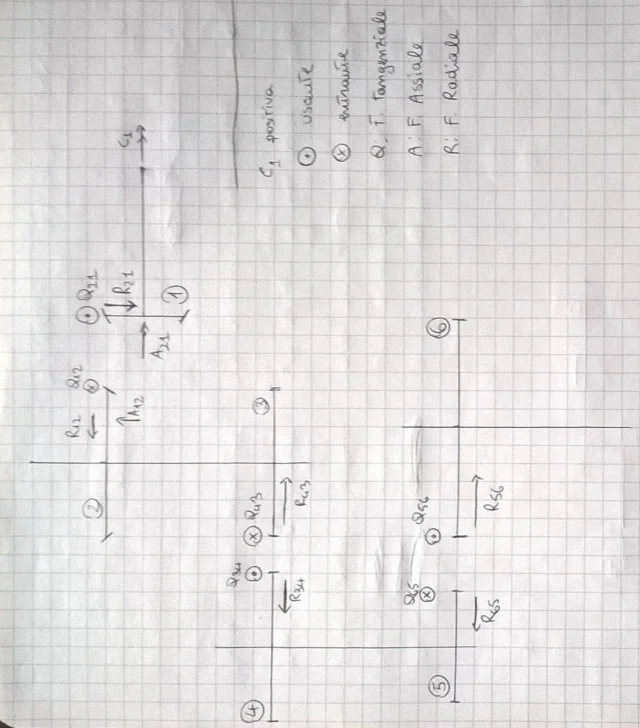
hello to all, as from title I have a doubt (lieve to tell the truth) on the verses of the forces agents on a reducer. I attach an image of the unifilare pattern of the reducer and a hand sketch of the agents forces. I thank everyone who decides to help me, I realize it's nonsense but it's better to ask that we stay in doubt!