fede27
Guest
Bye to all,
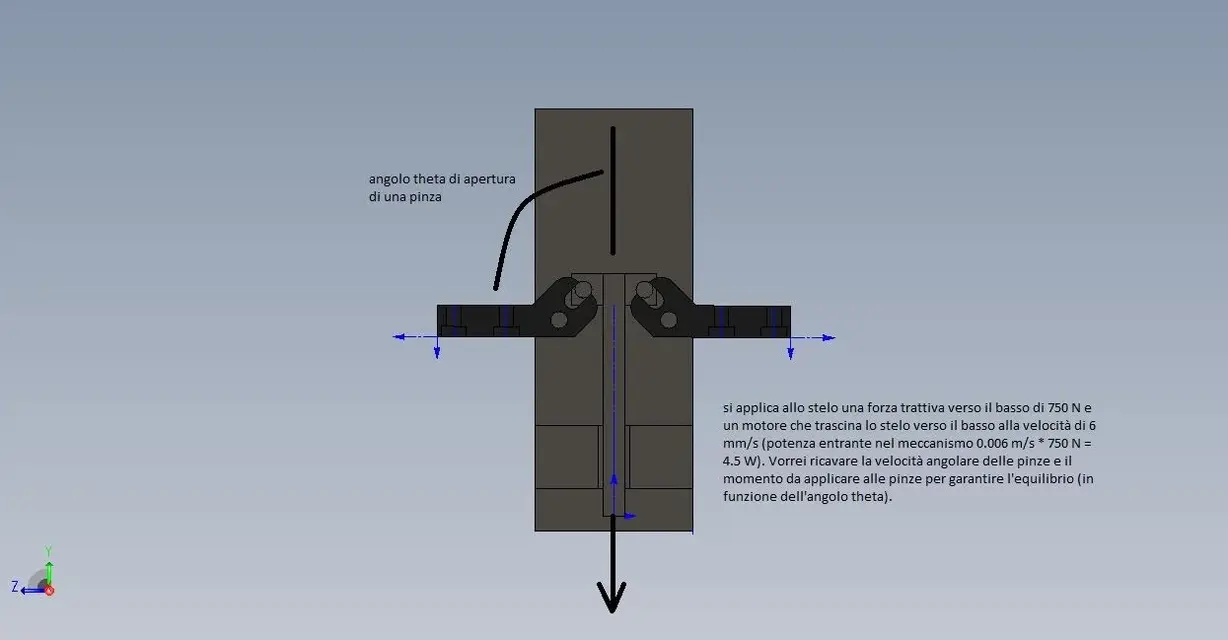
I am using motion to analyze a cinematism to a degree of freedom, it is a pneumatic clamp that serves to tighten objects.
My aim is to achieve static (force) and cinematic analysis of cinematism. I have a known force that is applied to the stem. if you apply a force to motive how do I get the balance on the yielder? Maybe brushing the whole set of configurations I need for operation. I mean to automate the classic manual static analysis (and then kinematic) that you could do for a well-defined configuration, of course thanks to the software you can solve the balances in multiple configurations in a short time.
so far I have not succeeded in my intent, if I apply a linear motor on the stem I impose a law of motion, but the forces that I detect are dependent on the masses and the inertias of the members, if I apply the necessary force he does not obtain the balance on the yielder as I would like.
Thank you for your help!
Faithful
I am using motion to analyze a cinematism to a degree of freedom, it is a pneumatic clamp that serves to tighten objects.
My aim is to achieve static (force) and cinematic analysis of cinematism. I have a known force that is applied to the stem. if you apply a force to motive how do I get the balance on the yielder? Maybe brushing the whole set of configurations I need for operation. I mean to automate the classic manual static analysis (and then kinematic) that you could do for a well-defined configuration, of course thanks to the software you can solve the balances in multiple configurations in a short time.
so far I have not succeeded in my intent, if I apply a linear motor on the stem I impose a law of motion, but the forces that I detect are dependent on the masses and the inertias of the members, if I apply the necessary force he does not obtain the balance on the yielder as I would like.
Thank you for your help!
Faithful