Dario-CRC
Guest
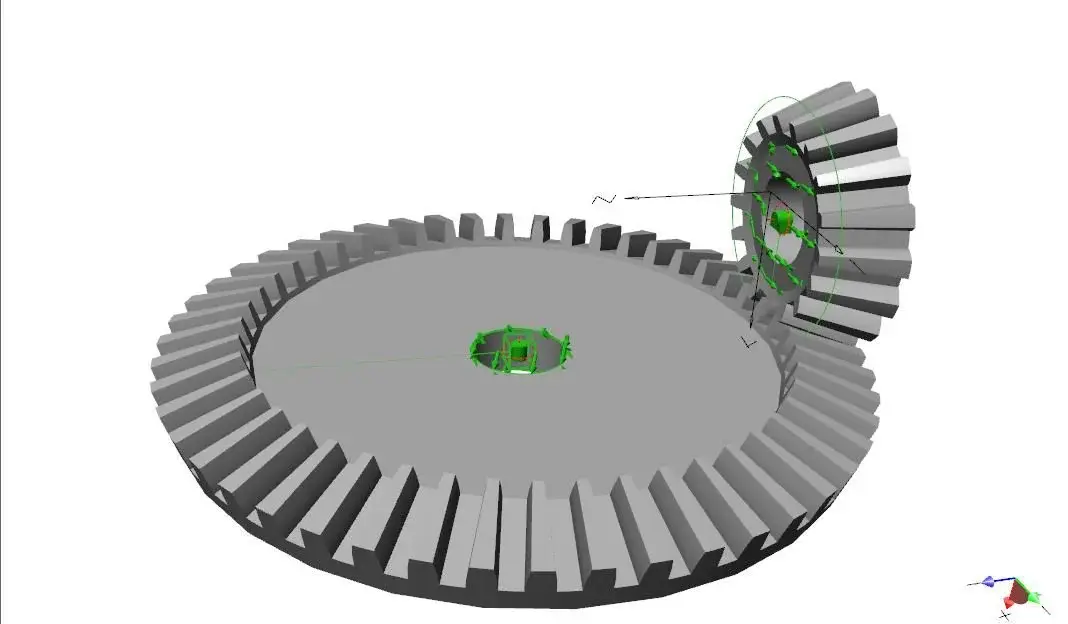
hello to all, I take advantage of your kindness to clarify a doubt. I am designing a mechanical reducer, consisting of two conical wheels with teeth straight to competing axes (90°). Where does my problem arise? I should perform a kinetodynamic analysis with vn4d but I can't simulate the collision between the two wheels.
as I proceed:
1)imposed as first in the constraint box the bevel gear option between the two conical wheels
2) imposed on the spindle motor option by setting its angle speed.
3)Delete gravity option
4)I set up a revolution joint in the wheel
at this point the pinion rotates with its angle speed. the wheel instead turns for its own (even in the opposite direction), of course even without considering collisions. I just can't figure out where I'm wrong. thanks in advance for any answers.
as I proceed:
1)imposed as first in the constraint box the bevel gear option between the two conical wheels
2) imposed on the spindle motor option by setting its angle speed.
3)Delete gravity option
4)I set up a revolution joint in the wheel
at this point the pinion rotates with its angle speed. the wheel instead turns for its own (even in the opposite direction), of course even without considering collisions. I just can't figure out where I'm wrong. thanks in advance for any answers.