38luglio
Guest
Hello everyone,
for my thesis work I am engaged in the realization of a link interface between a generic collaborative robot, having maximum weight of 40 kg, with a generic agv. this interface must allow the rotation of the entire cobot around a vertical axis for the positioning of this in the operations of pick and place (this need could be due, for example, to the desire to extend the accessibility of the arm above, mounting it in an "eccentric" way compared to the axis of the interface).
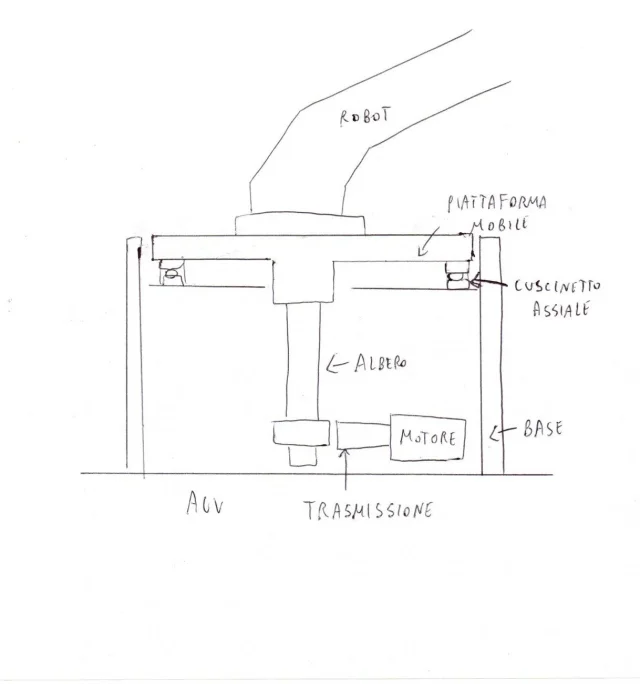
the interface will have to have a solid part to the agg and a rotating part, on which the robot is mounted. To develop it, I had thought of the attached scheme, but I ask you some advice on the actual realization, in terms of components.
I had thought of a dc engine, connected by a skewer or accident transmission, to a tree on which the rotating platform that holds the robot (maybe by means of a grooved profile or simply by means of a tab). Taking into account that the system parameters such as engine plate data and transmission ratio will be chosen as a result of subsequent simulations on simulink, I wanted more in detail on the mechanical "layout" of the system, in particular on the vertical shaft configuration (springs, bearings, quarries, threaded codons, etc.) than, only to fix ideas, I designed perfectly cylindrical. Consider that the base of the interface will have a diameter of 500 mm and the overall height, excluding the robot, must be as little as possible. I wait for your advice, thank you in advance.
for my thesis work I am engaged in the realization of a link interface between a generic collaborative robot, having maximum weight of 40 kg, with a generic agv. this interface must allow the rotation of the entire cobot around a vertical axis for the positioning of this in the operations of pick and place (this need could be due, for example, to the desire to extend the accessibility of the arm above, mounting it in an "eccentric" way compared to the axis of the interface).
the interface will have to have a solid part to the agg and a rotating part, on which the robot is mounted. To develop it, I had thought of the attached scheme, but I ask you some advice on the actual realization, in terms of components.
I had thought of a dc engine, connected by a skewer or accident transmission, to a tree on which the rotating platform that holds the robot (maybe by means of a grooved profile or simply by means of a tab). Taking into account that the system parameters such as engine plate data and transmission ratio will be chosen as a result of subsequent simulations on simulink, I wanted more in detail on the mechanical "layout" of the system, in particular on the vertical shaft configuration (springs, bearings, quarries, threaded codons, etc.) than, only to fix ideas, I designed perfectly cylindrical. Consider that the base of the interface will have a diameter of 500 mm and the overall height, excluding the robot, must be as little as possible. I wait for your advice, thank you in advance.