crestus
Guest
Hello, people!
I write you because I need help!
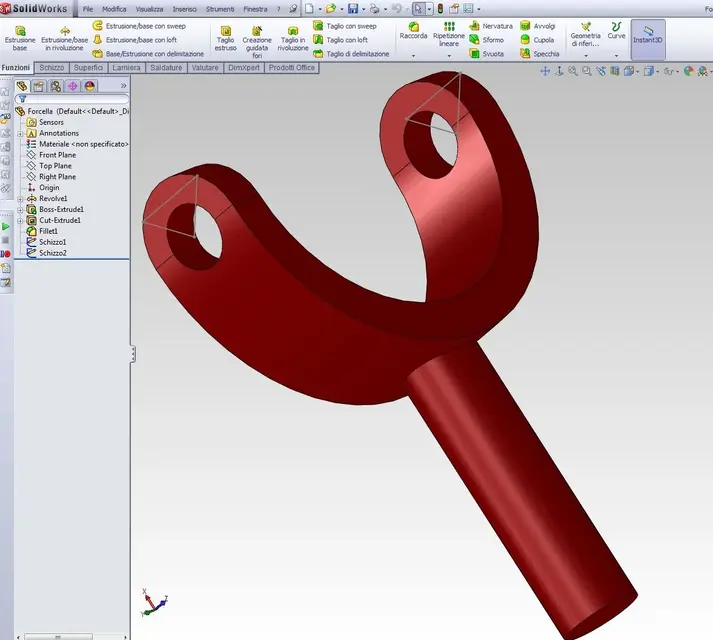
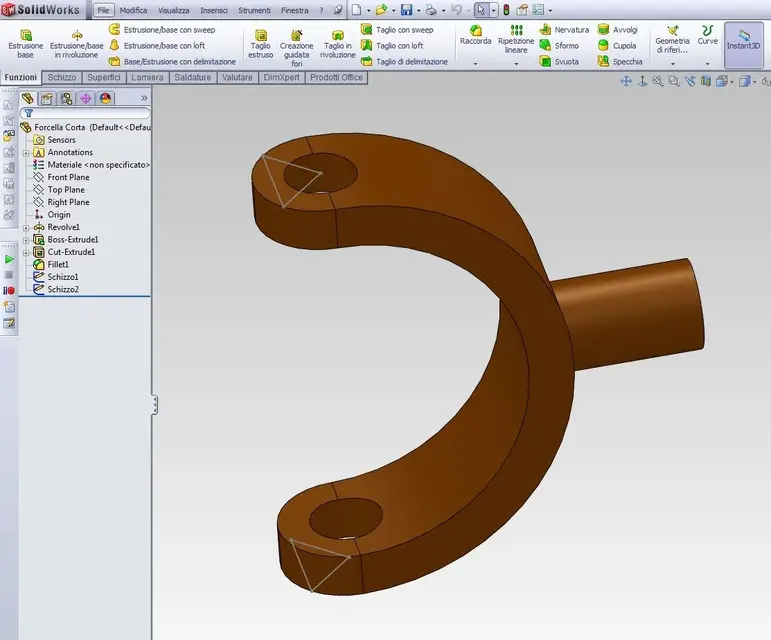
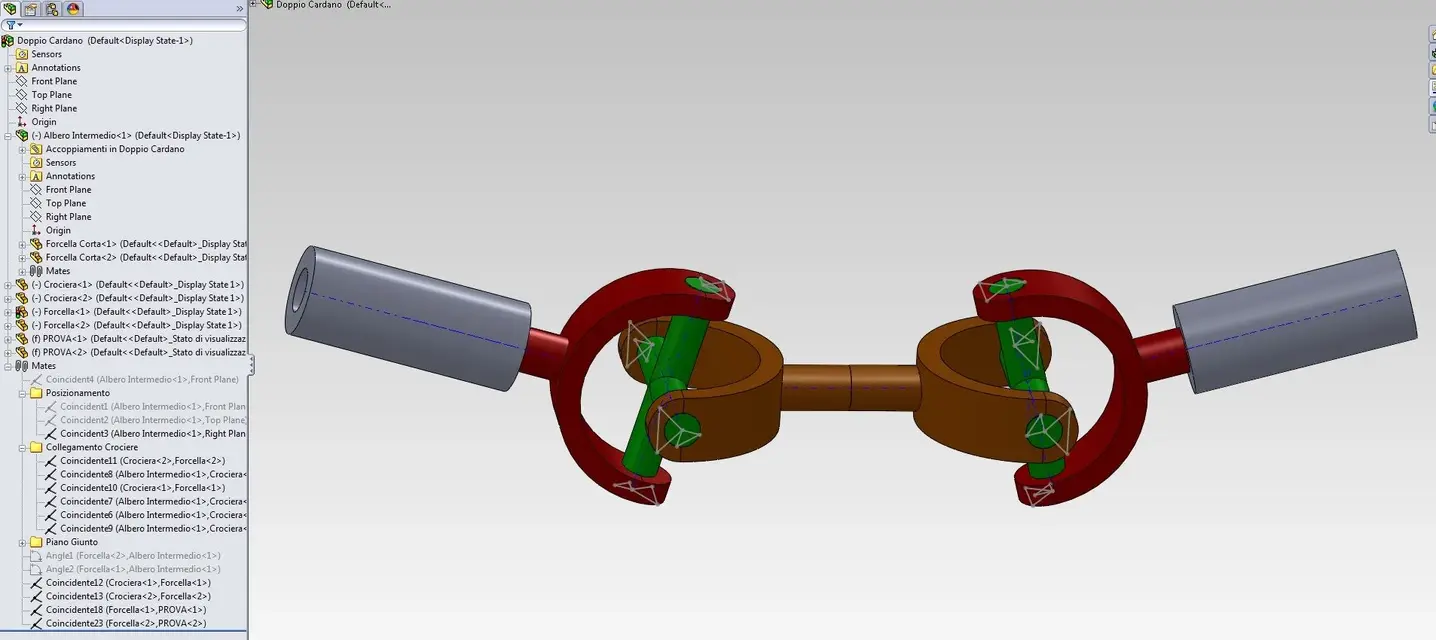
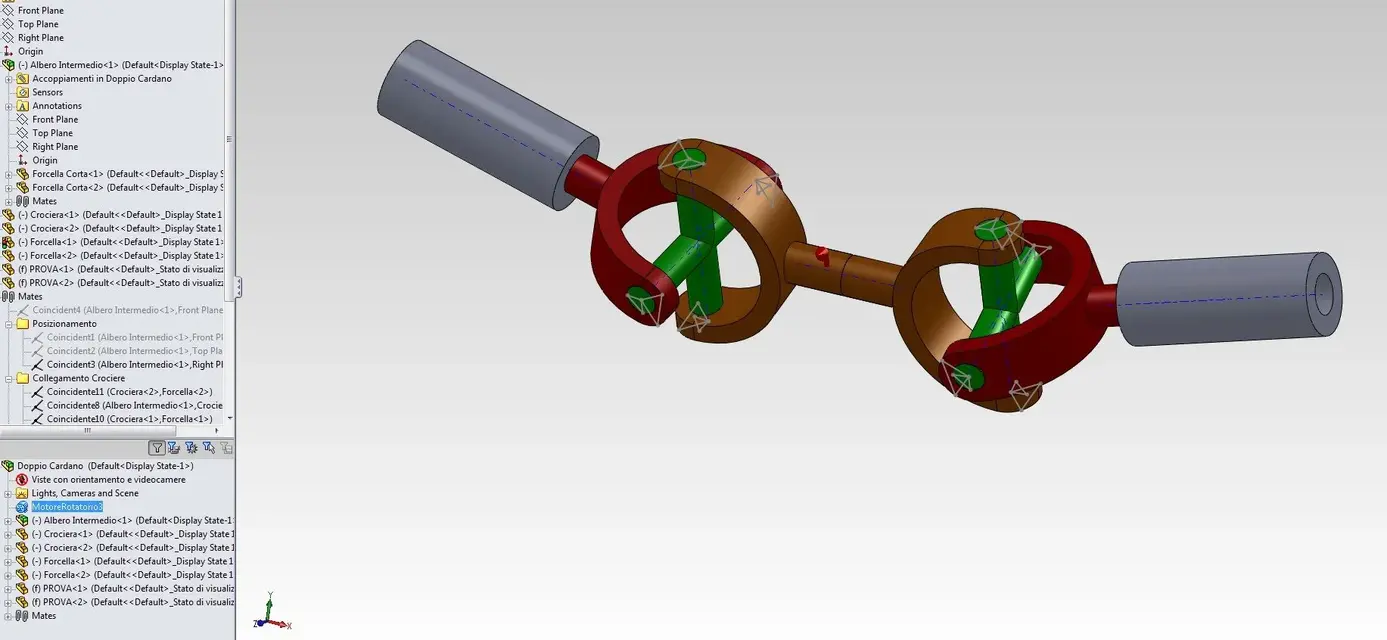
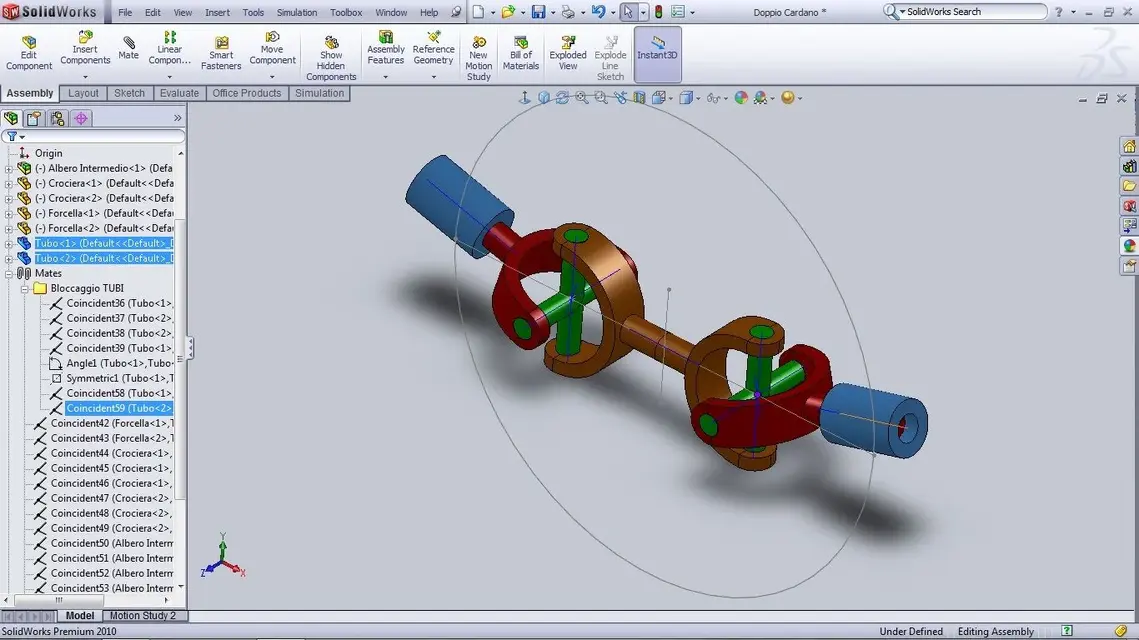
I am modeling a principle scheme of a double cardanic joint, but I am encountering great difficulties with the study of movement.
I have already searched but I have found nothing but this debate... unfortunately having the 2010 version sp 2.1 I can not see the files :frown:
I said this I tried everything that comes to my mind (cardial joint, reduction of couplings, use of an additional axis instead of the symmetry between the two trees at the extremes, setting a point-by-point movement manually and someone that does not come to mind), but with the study of movement just you do not want to move...(scrowd a little at the beginning, but then it freezes...) on the contrary, turning it turns manually ...
same behavior with a single or simple cardanic. . .
I humbly ask your help... .
I write you because I need help!
I am modeling a principle scheme of a double cardanic joint, but I am encountering great difficulties with the study of movement.
I have already searched but I have found nothing but this debate... unfortunately having the 2010 version sp 2.1 I can not see the files :frown:
I said this I tried everything that comes to my mind (cardial joint, reduction of couplings, use of an additional axis instead of the symmetry between the two trees at the extremes, setting a point-by-point movement manually and someone that does not come to mind), but with the study of movement just you do not want to move...(scrowd a little at the beginning, but then it freezes...) on the contrary, turning it turns manually ...
same behavior with a single or simple cardanic. . .
I humbly ask your help... .