reggio
Guest
Hi, come back!
I would like to show you the difficulties I encounter with a simple study of movement and first on those I have encountered in the use of:
view/screen/video capture
In practice I see that on 4 video compressors, the 1st we auto do not recommend (generates corrupt files) the 2nd and 3rd are equal, the 4th creates huge files, and all show nothing but the assembling, leaving the commands, the pointer, the alerts, ....
question: do you use that? If so, would you explain how to set it up?
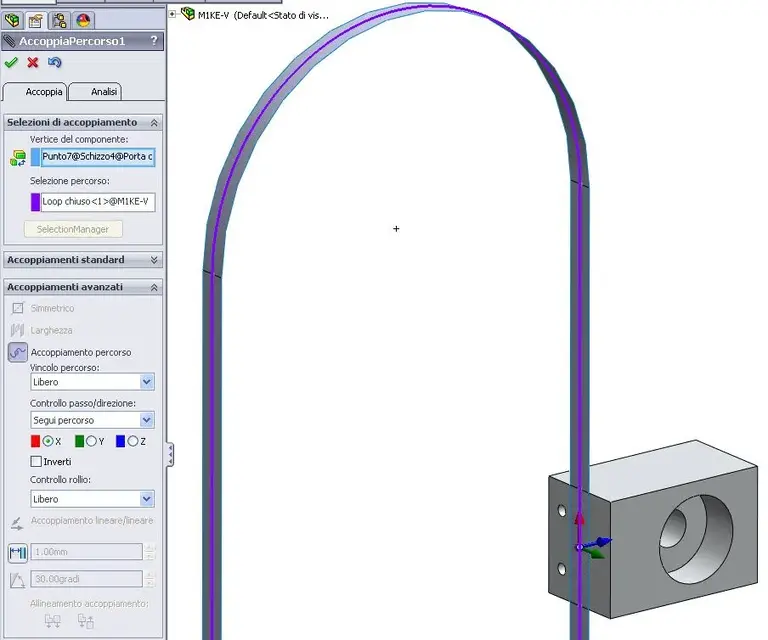
Okay, by going to the real problem, I'm going to train you a video of the handmade movement. [youtube]b58[/youtube]and another video (made with camstudio)[youtube]jmofjffarya[/youtube]that shows my attempts to run a simple 2 block movement study bound to 2 closed tracks and how swx interpreters in his way to do.. .
To begin with, I would just understand how to make a simple "track"
then, understood that I would like to add more groups to step and turn them together,
Finally launch a rendered film.... and then... and then... The Moon:
I also attach files hoping for "free trials" and solutions :tongue:
I would like to show you the difficulties I encounter with a simple study of movement and first on those I have encountered in the use of:
view/screen/video capture
In practice I see that on 4 video compressors, the 1st we auto do not recommend (generates corrupt files) the 2nd and 3rd are equal, the 4th creates huge files, and all show nothing but the assembling, leaving the commands, the pointer, the alerts, ....
question: do you use that? If so, would you explain how to set it up?
Okay, by going to the real problem, I'm going to train you a video of the handmade movement. [youtube]b58[/youtube]and another video (made with camstudio)[youtube]jmofjffarya[/youtube]that shows my attempts to run a simple 2 block movement study bound to 2 closed tracks and how swx interpreters in his way to do.. .
To begin with, I would just understand how to make a simple "track"
then, understood that I would like to add more groups to step and turn them together,
Finally launch a rendered film.... and then... and then... The Moon:
I also attach files hoping for "free trials" and solutions :tongue:





 ...and you?
...and you?