brn
Guest
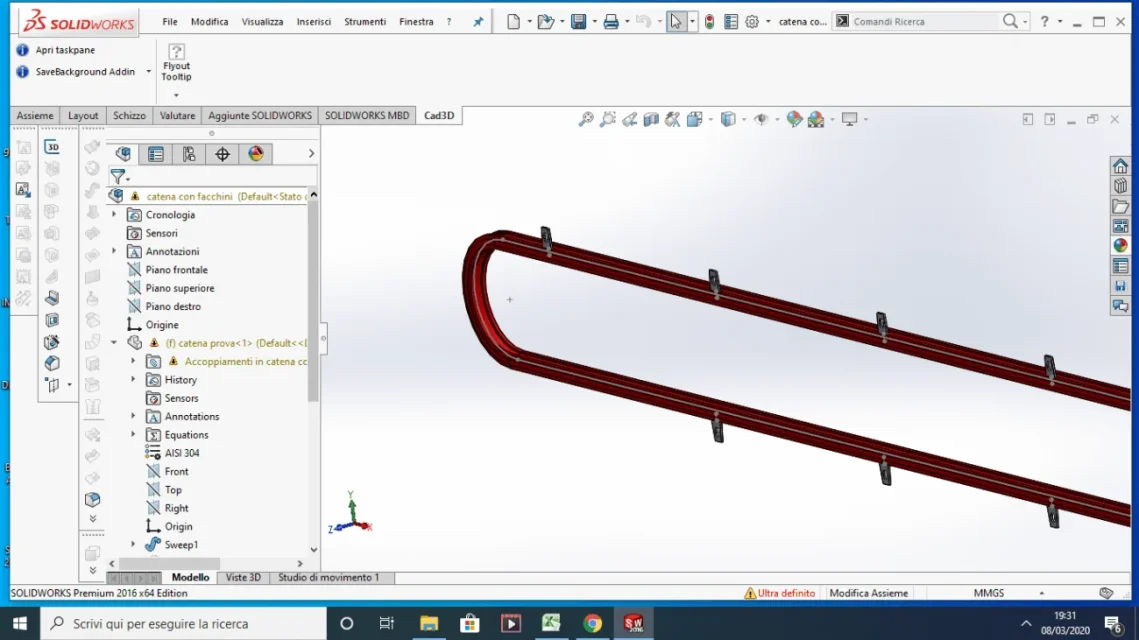
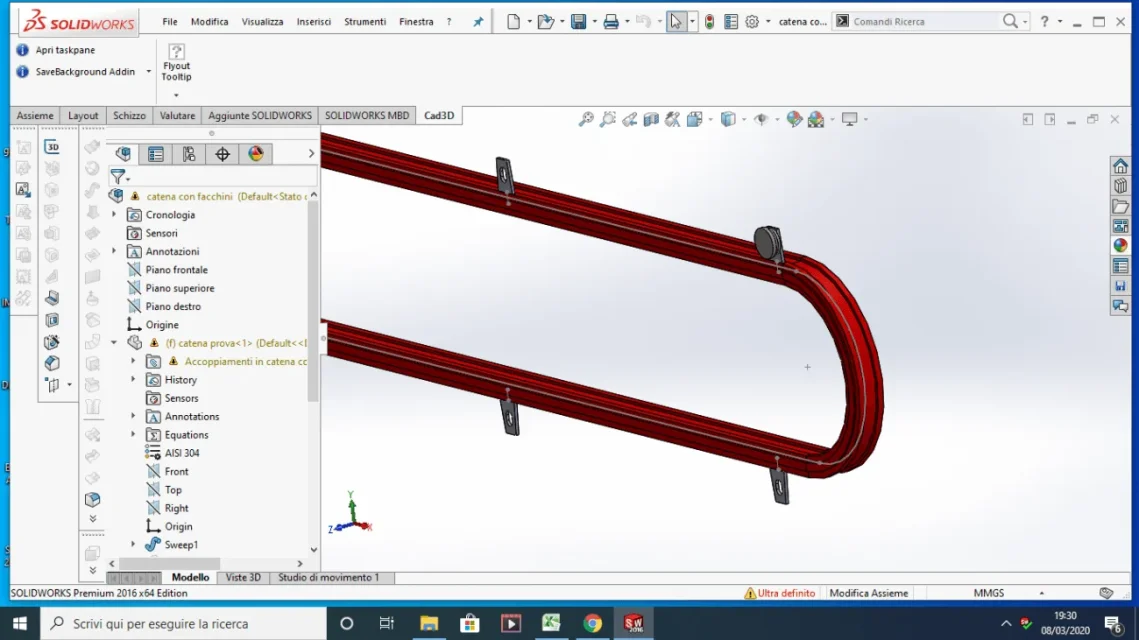
hello to all I would have a problem: I'm supposed to shape a chain with handkerchiefs, I don't care about the chain itself that I shaped like a sweep with its profile to assess its footprint. I am interested instead to model the position of the carpenters along the chain according to a parameter that gives me the position of the first bundle, I tried with the chain repetition but the result does not come back: in some points I have holes, moreover if the point on dynamic does not put me correctly the carpenters on the return of the chain.
I attach the file together and the step file.
Thank you very much
I attach the file together and the step file.
Thank you very much