andrea1901
Guest
Bye to all,
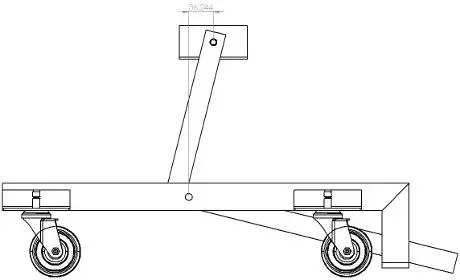
I am planning with solidworks 2011 a pair of handcrafted trolleys to lift the bike and be able to park it comfortably in the garage.
Now that now practically finished the model I would like to check if, applying a certain weight on the pedane the cart behaves as I wish, so that it gives enough size and thickness of the materials and especially as study of the movement of the lifter in relation to the cart.
I tried to follow the tutorials attached to solidworks but don't treat my exact case and so I'm a bit in trouble given my inexperience.
Can any of you guru help me?
thanks for the attention
Andrea
I am planning with solidworks 2011 a pair of handcrafted trolleys to lift the bike and be able to park it comfortably in the garage.
Now that now practically finished the model I would like to check if, applying a certain weight on the pedane the cart behaves as I wish, so that it gives enough size and thickness of the materials and especially as study of the movement of the lifter in relation to the cart.
I tried to follow the tutorials attached to solidworks but don't treat my exact case and so I'm a bit in trouble given my inexperience.
Can any of you guru help me?
thanks for the attention
Andrea