Fulvio Romano
Guest
controllerso far we have talked about the manipulator. Now let's start talking about half the robot's thinking, the controller.
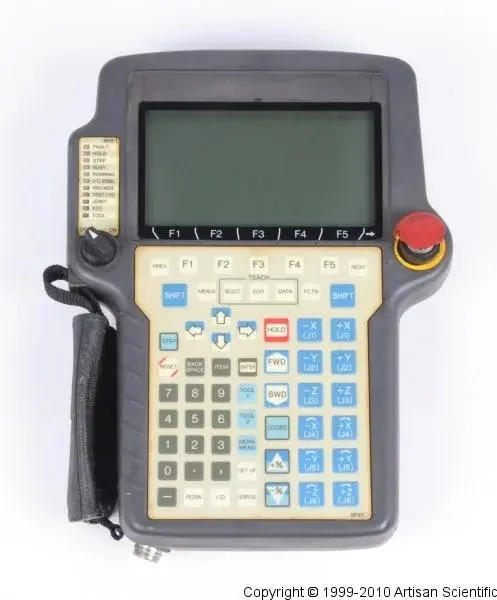
the controller, which is purchased along with the manipulator, is the electronic part that deals with engine power, feedback data management, etc. we see what elements it is composed of.
Wardrobe closetThe cabinet is the electrical panel that contains the electronic part. outside has an emergency fungus, a key mode selector (obligatory according to the norm), often a operating counter, and connectors for external devices. often has an ethernet socket and a usb port for connecting peripherals.
inside, the closet consists of the following macroblocks:
computeran industrial pc deals with the real control of the manipulator. it implements the algorithms of cinematic inversion, control, the interpreter of the programming language, the management of the peripherals, etc. in practice it deals with the logical management of everything concerning the robot, excluding the security. These are handled via hardware by a specific card.
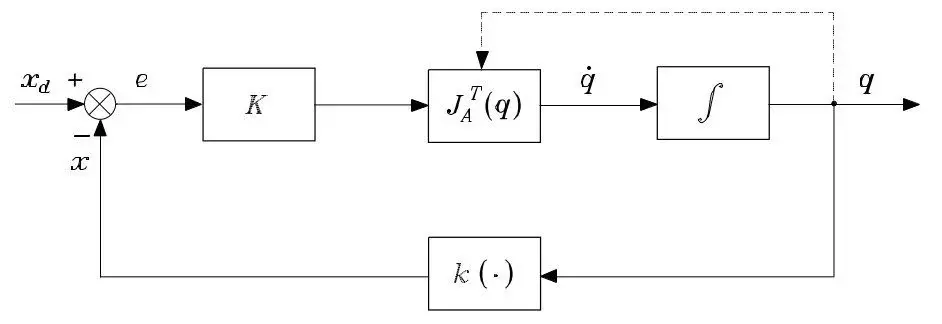
Cardboardthe axis card takes in the input references of position, speed and acceleration that the computer decides should have the engines, and also receives the data of the robot's ownceptive sensors (encoder or resolver). the difference between the two is the so-called " mistake" according to which it is necessary to pilot the engines so that the movement of the robot is the one wanted, that is the error is kept within an acceptable threshold. Actually part of the control is carried out by the pc, and it starts from the boards tab, but for a more detailed description I will try to write something further there. it will not be simple without introducing concepts of automation and control, but the attempt is obligatory.
drivesdrives are the devices that physically feed the engines. receive signals from the axle board and translate them into engine power.
the controller, which is purchased along with the manipulator, is the electronic part that deals with engine power, feedback data management, etc. we see what elements it is composed of.
Wardrobe closetThe cabinet is the electrical panel that contains the electronic part. outside has an emergency fungus, a key mode selector (obligatory according to the norm), often a operating counter, and connectors for external devices. often has an ethernet socket and a usb port for connecting peripherals.
inside, the closet consists of the following macroblocks:
computeran industrial pc deals with the real control of the manipulator. it implements the algorithms of cinematic inversion, control, the interpreter of the programming language, the management of the peripherals, etc. in practice it deals with the logical management of everything concerning the robot, excluding the security. These are handled via hardware by a specific card.
Cardboardthe axis card takes in the input references of position, speed and acceleration that the computer decides should have the engines, and also receives the data of the robot's ownceptive sensors (encoder or resolver). the difference between the two is the so-called " mistake" according to which it is necessary to pilot the engines so that the movement of the robot is the one wanted, that is the error is kept within an acceptable threshold. Actually part of the control is carried out by the pc, and it starts from the boards tab, but for a more detailed description I will try to write something further there. it will not be simple without introducing concepts of automation and control, but the attempt is obligatory.
drivesdrives are the devices that physically feed the engines. receive signals from the axle board and translate them into engine power.










")