gio_deere
Guest
I have understood, I was aware of it but regarding the helical wheels, in fact we have discussed it in university because in the formula of the agma norm regarding the wear appeared the term gr, degree of replenishment.That's what I didn't answer.
This parameter indicates how many teeth in the socket are. Since there are teeth in grip, it turns out better strength and less working game if I make inversions, if I have a factor of repletion greater than two. I will clearly have a little more wear. if I use helical wheels I also have the covering due to the propeller and for example I can use important angles to significantly improve the transmission of the total motion.
for the cylindrical wheels, instead, we did not talk about it. for my personal experience however I know that it is not only 1 tooth that works in grip, so what I ask is:
- how to calculate the degree of cover for cylindrical wheels?
Is it possible for me to make a mistake?
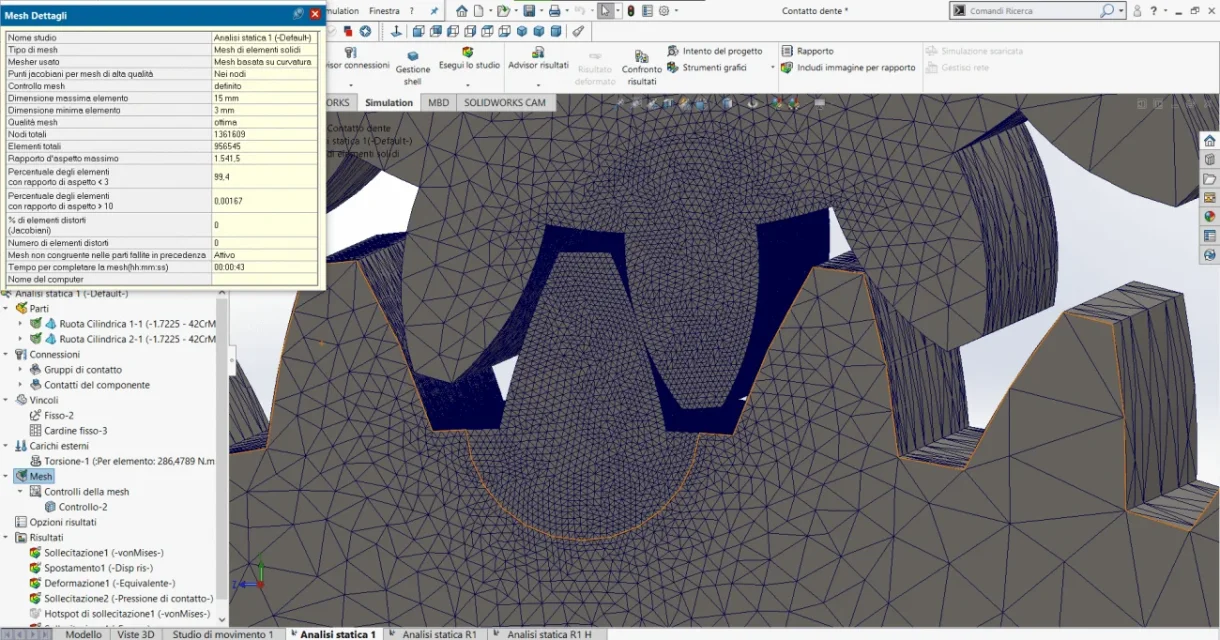
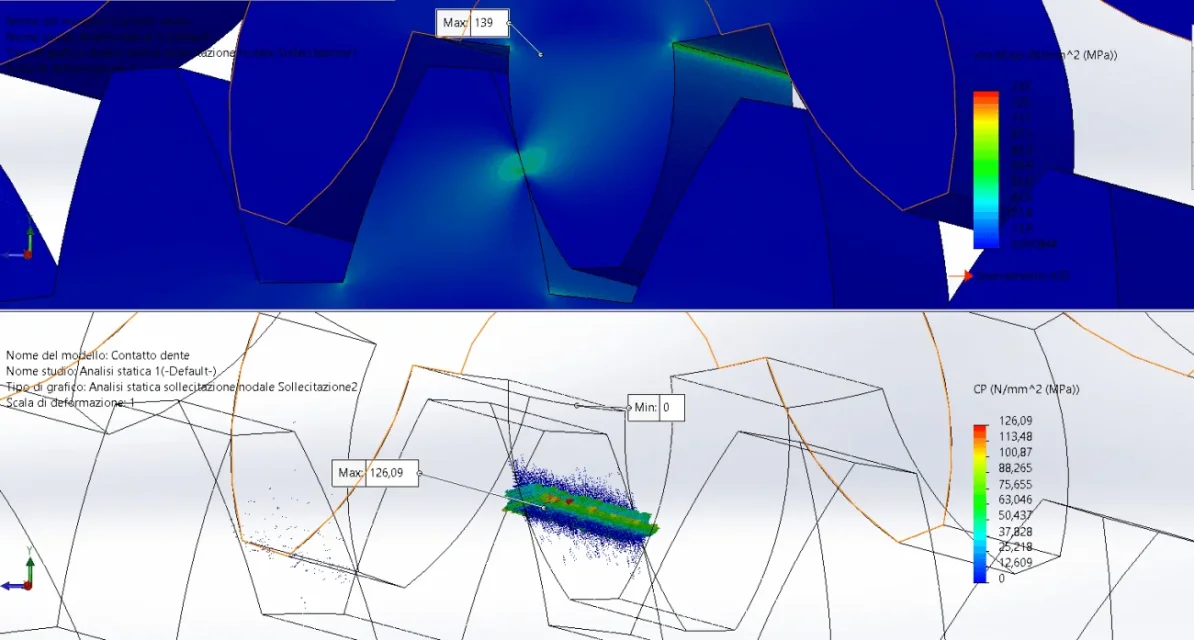
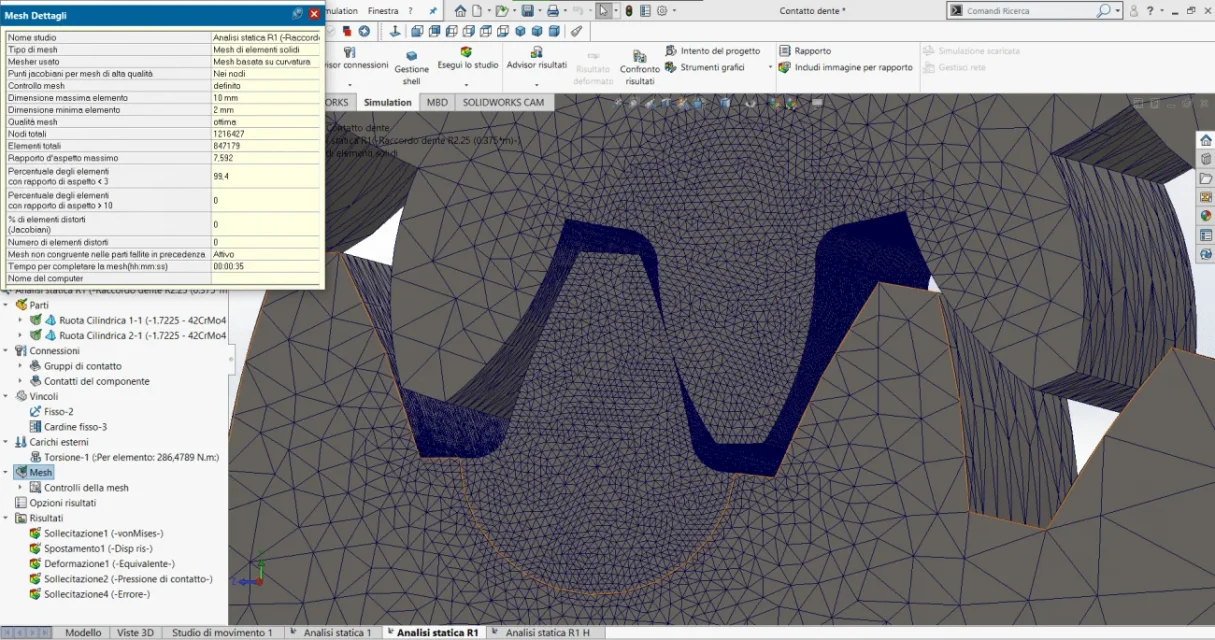
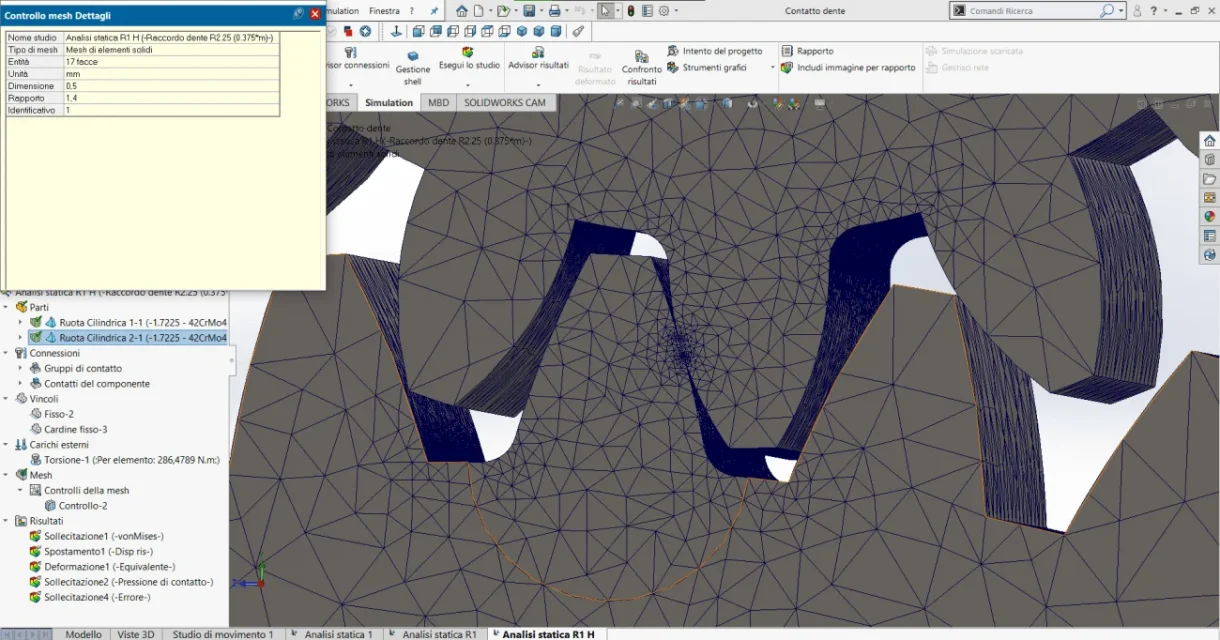
today I will smoke my pc a little, because I will again perform the fem simulations on the wheels, using everything I learned here to compare a little numbers. I will improve the mesh by inflating it even more on the tooth (I will make elements from 0.5mm as recommended), I will use the mesh based on curvature and change the base connection radius. I do not know whether or not to use the h-adactive or p-adactive method or either. I will give you proof and I will update you at least to share with you the results.